一种水下机器人
作者: A dam
2025-08-27
发明专利
申请号:202210225403 .0
专利权人:中国科学院深圳先进技术研究院
授权日:2023.04.25
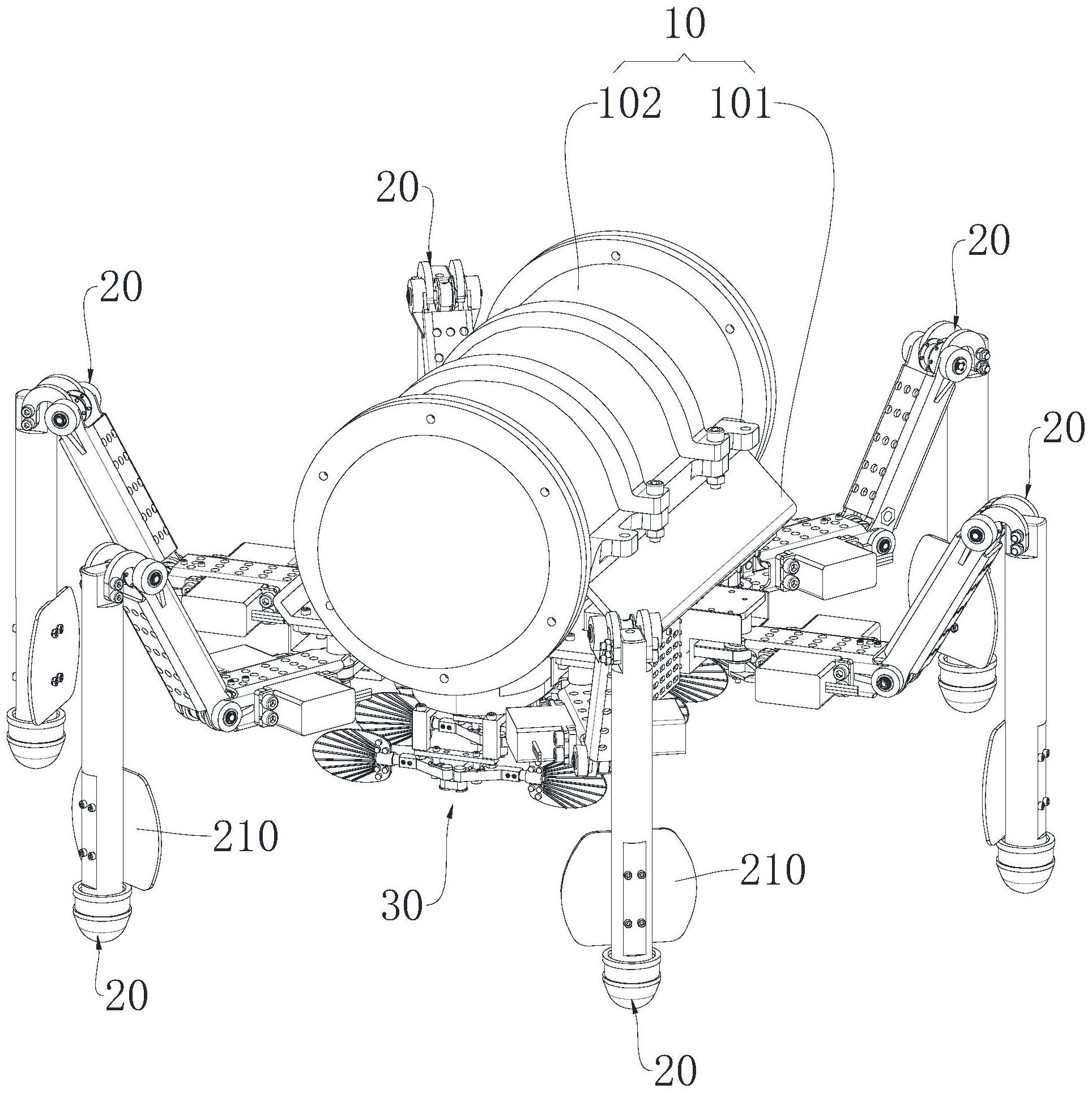
本申请提供了一种水下机器人,包括机身及多个连接于所述机身的腿部模块;所述腿部模块包括连接臂、大腿、小腿、第一驱动机构和第二驱动机构,所述连接臂连接于机身,所述连接臂、大腿及小腿依次转动连接;所述第一驱动机构包括相连的第一驱动器和第一传动组件,所述第一驱动器连接于连接臂,所述第一传动组件连接所述大腿,所述第一驱动器通过第一传动组件驱动所述大腿相对于连接臂转动;所述第二驱动机构包括相连的第二驱动器和第二传动组件,所述第二驱动器连接于连接臂,所述第二传动组件连接小腿,所述第二驱动器通过第二传动组件驱动小腿相对于大腿转动。本申请主要解决现有足式机器人的足端由于惯量较大而在水中控制困难的技术问题。
留下评论:
Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78