基于攻角法的仿生机器鱼定深控制方法和装置
作者: A dam
2025-08-29
发明专利
申请号:202111143067 .7
专利权人:深圳先进技术研究院
授权日:2022.12.02
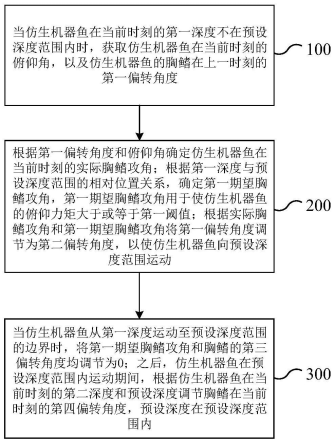
本申请提供一种基于攻角法的仿生机器鱼定深控制方法和装置,属于机器鱼控制技术领域。若仿生机器鱼在当前时刻的第一深度不在预设深度范围内,则根据惯性传感器获取到的仿生机器鱼在当前时刻的俯仰角和仿生机器鱼胸鳍在上一时刻的第一偏转角度确定当前时刻的实际胸鳍攻角,根据实际胸鳍攻角和第一期望胸鳍攻角将第一偏转角度调节为第二偏转角度,使得仿生机器鱼通过上浮运动或下潜运动向预设深度范围运动;仿生机器鱼在预设深度范围内运动期间,根据深度传感器获取到的仿生机器鱼在当前时刻的第二深度和预设深度调节胸鳍在当前时刻的第四偏转角度,以实现定深巡游。本申请提供的方法可以解决现有的定深控制方法调节过程繁琐、实时性差的问题。
留下评论:
Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78