机械手及其自动定心夹紧夹具
作者: A dam
2025-09-04
实用新型
申请号:201922243296 .0
专利权人:中国科学院深圳先进技术研究院
授权日:2020.09.04
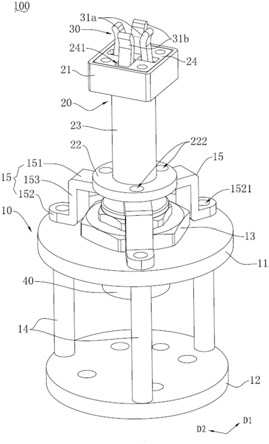
本实用新型涉及机械夹爪的技术领域,提供了一种机械手及其自动定心夹紧夹具,包括支撑架、支撑在支撑架上的安装座和定心夹紧组件;定心夹紧组件包括沿安装座的整个周向呈等间距布置的四个夹爪构件和滑动设置在安装座中并与每个夹爪构件分别相抵的操作轴,四个夹爪构件分别枢转接附在安装座上;支撑架上设置有使操作轴沿操作轴的轴向移动以驱动夹爪构件相对安装座转动的驱动件。该自动定心夹紧夹具,采用在安装座的整个周向呈等间距地布置四个夹爪构件,四个夹爪构件分别枢转接附在安装座上,操作轴与每个夹爪构件分别相抵,驱动件使操作轴移动以驱动夹爪构件相对安装座转动,这样,采用四爪式的夹紧方式,结构对称,可实现自定心夹紧。
留下评论:
1231231 2025-12-02
1223412312234123 2025-11-23
123213Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78