一种管道机器人
作者: A dam
2025-09-04
实用新型
申请号:201922178134 .3
专利权人:中国科学院深圳先进技术研究院
授权日:2020.08.25
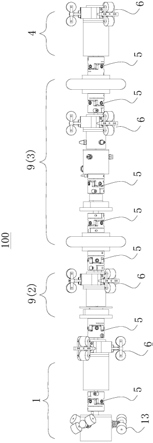
本实用新型适用于管道作业技术领域,提供了一种管道机器人,该管道机器人包括:驱动模块,包括主动轮组件和第一驱动组件;主动轮组件包括多个主动轮支架和转动安装于每一主动轮支架上的至少一个主动轮,第一驱动组件用于驱动各主动轮支架转动,主动轮的中心轴线与主动轮支架的转动中心轴线之间形成夹角且夹角不为90°;以及至少一个作业模块,与驱动模块之间通过万向节连接;该管道机器人的体积可以更小,能够应用于内径较小的管道内作业;万向节的体积小且灵活度好,该管道机器人在管道内可灵活转弯,不容易出现卡死现象;通过万向节连接至少一个作业模块,能够布置更多的作业模块,丰富其功能性,提高其实用性。
留下评论:
Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78