一种爪式机器人越障车轮
作者: A dam
2025-09-04
发明专利
申请号:201811220524 .6
专利权人:中国科学院深圳先进技术研究院
授权日:2023.09.01
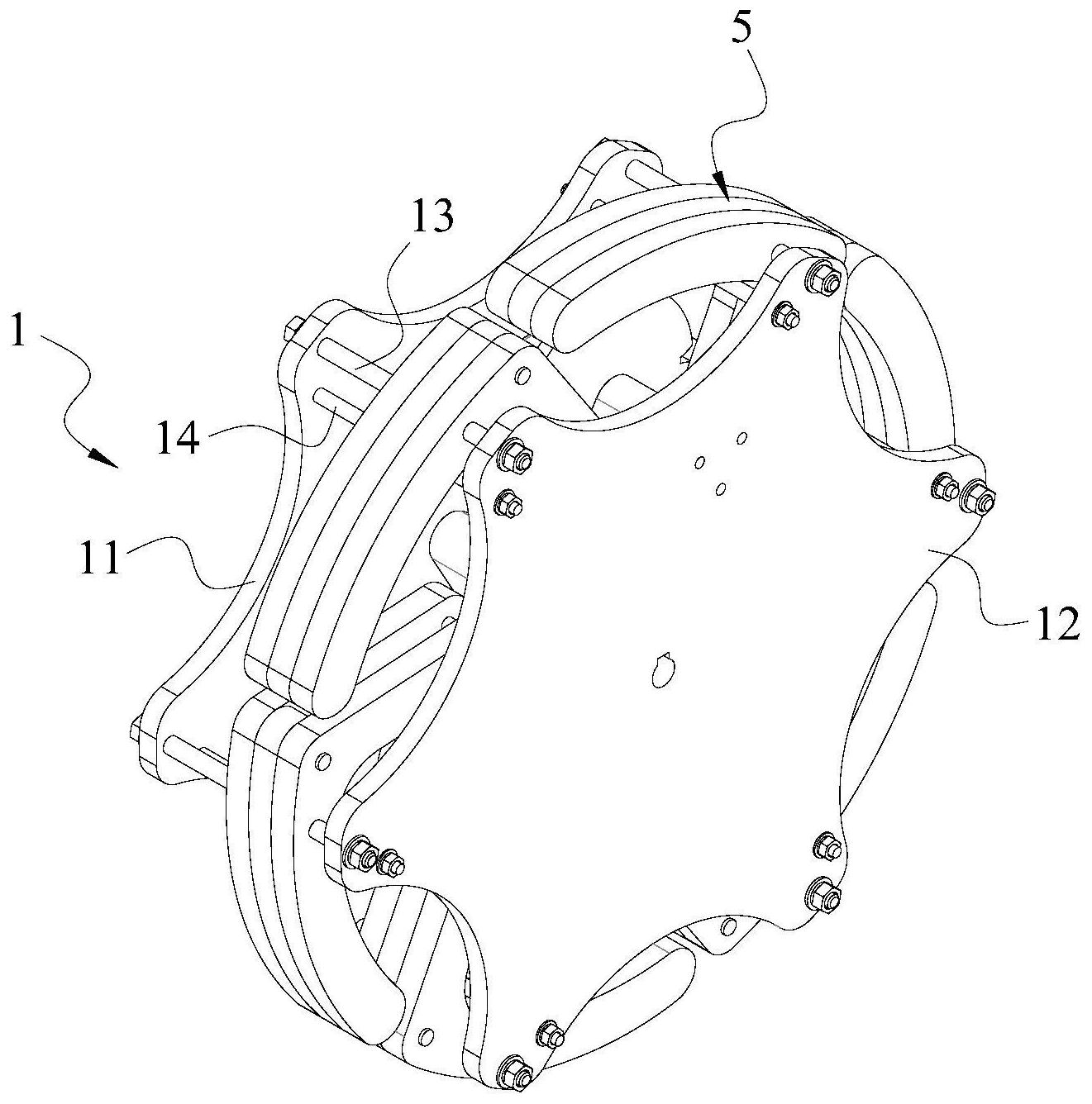
本发明适用于车轮技术领域,提供了一种爪式机器人越障车轮,包括车轮主体;驱动机构,设置于所述车轮主体内;传动机构,设置于所述车轮主体内,所述传动机构的输入端与所述驱动机构的输出端连接;凸轮,与所述车轮主体同轴设置,所述凸轮与所述传动机构的输出端连接;以及多个爪式摆杆,沿所述车轮主体的圆周方向均匀布置,所述爪式摆杆转动连接于所述车轮主体上,所述爪式摆杆的一端与所述凸轮抵接,所述爪式摆杆的另一端为自由端。本发明通过越障车轮结构代替足腿式越障结构,实现车轮形状实时快速变换,从而极大地提高作业效率,且结构简单,能够减少越障结构设计的复杂程度,减小机器人的体积和重量,提高机器人的灵活性与负载能力。
留下评论:
Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78