一种机器人的定位方法、系统及应用
作者: A dam
2025-08-27
发明专利
申请号:202211482676 .X
专利权人:中国科学院深圳先进技术研究院
授权日:2025.7.18
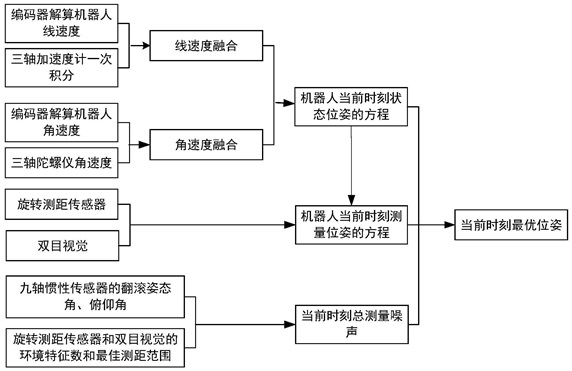
本发明提供了一种机器人的定位方法、系统及应用,涉及定位系统技术领域。其中,该定位方法包括:获取上一时刻状态位姿、当前时刻线速度、当前时刻角速度、当前时刻与上一时刻的时间变化量、线加速度和角加速度,并根据上一时
刻位姿状态向量、当前时刻线速度、当前时刻角速度、当前时刻与上一时刻的时间变化量、线加速度和角加速度计算当前时刻状态位姿;获取当前时刻总测量噪声,并根据当前时刻总测量噪声和当前时刻状态位姿计算当前时刻测量位姿;根据当前时刻状态位姿和当前时刻测量位姿计算当前时刻最优位姿。本发明利用紧耦合和松耦合相结合的方式融合各传感器的位姿估计结果,提
高了机器人的定位精度,成本低廉。
留下评论:
Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78