多机器人自主控制系统
作者: A dam
2025-12-18
发明专利:
申请号:CN201711435778.5
专利权人:固高科技(深圳)有限公司
授权日:2017/12/26
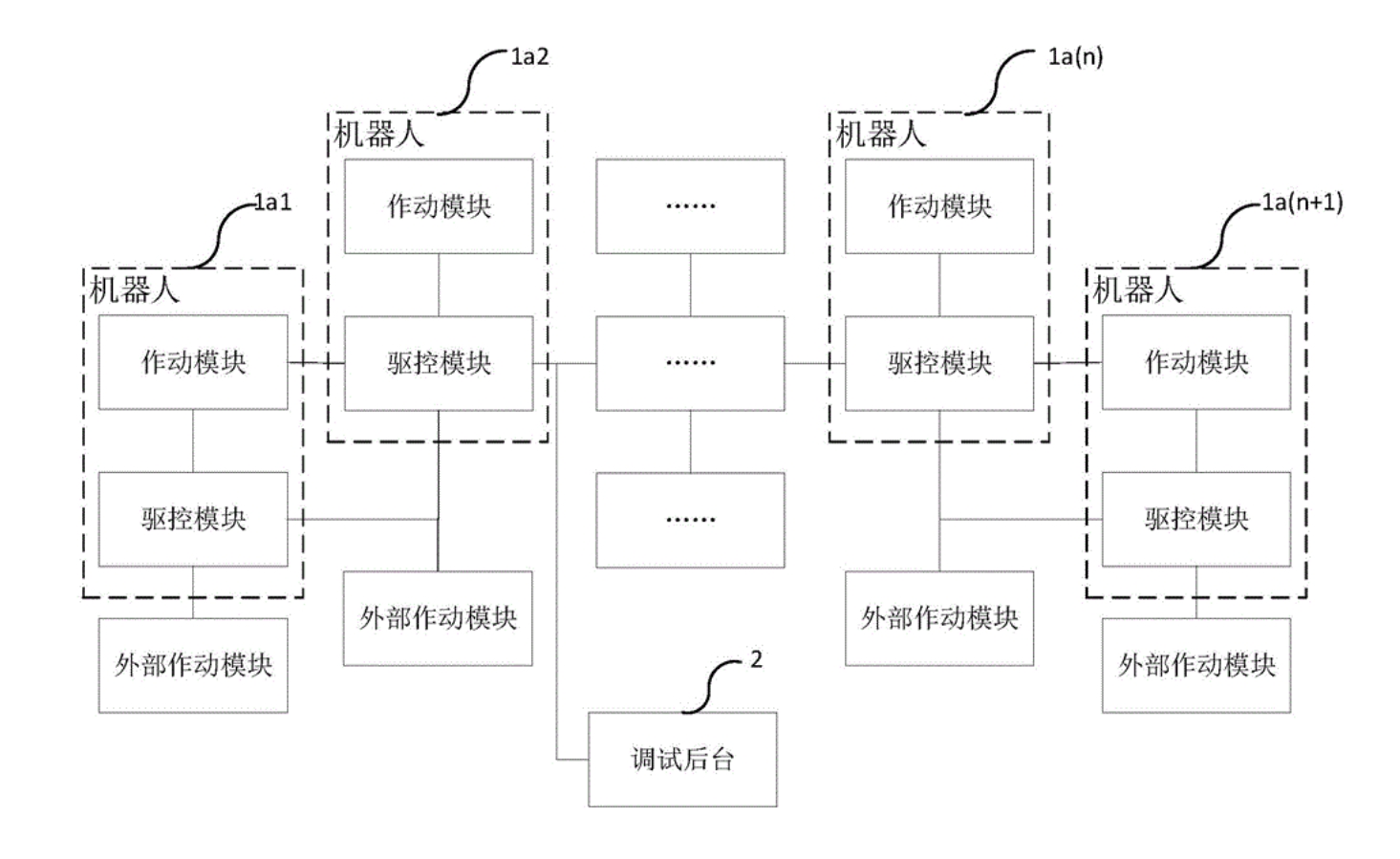
本发明涉及一种多机器人自主控制系统,其特征在于,每一个所述机器人包括驱控模块、作动模块;所述驱控模块可控制作动模块进行作动;多个所述驱控模块之间通过现场总线相互通信连接;多个所述驱控模块通过所述现场总线相互协同实现对所述作动模块的同步控制。本发明提供的多机器人自主控制系统,安全冗余设计,支持多机器人高实时性同步,同步周期达1ms。分布式运算可省去主控制器,实现从站对从站的数据交互及云端对现场运行监测和调整。各个芯片之间采用MAC协议进行网络传输,传输延迟远小于1us,运动控制周期与伺服周期完全同步。
留下评论:
Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78