激光雷达和深度相机联合标定的标定板、标定方法和系统
作者: A dam
2025-08-27
发明专利
申请号:202210575958 .8
专利权人:中国科学院深圳先进技术研究院
授权日:2025.05.16
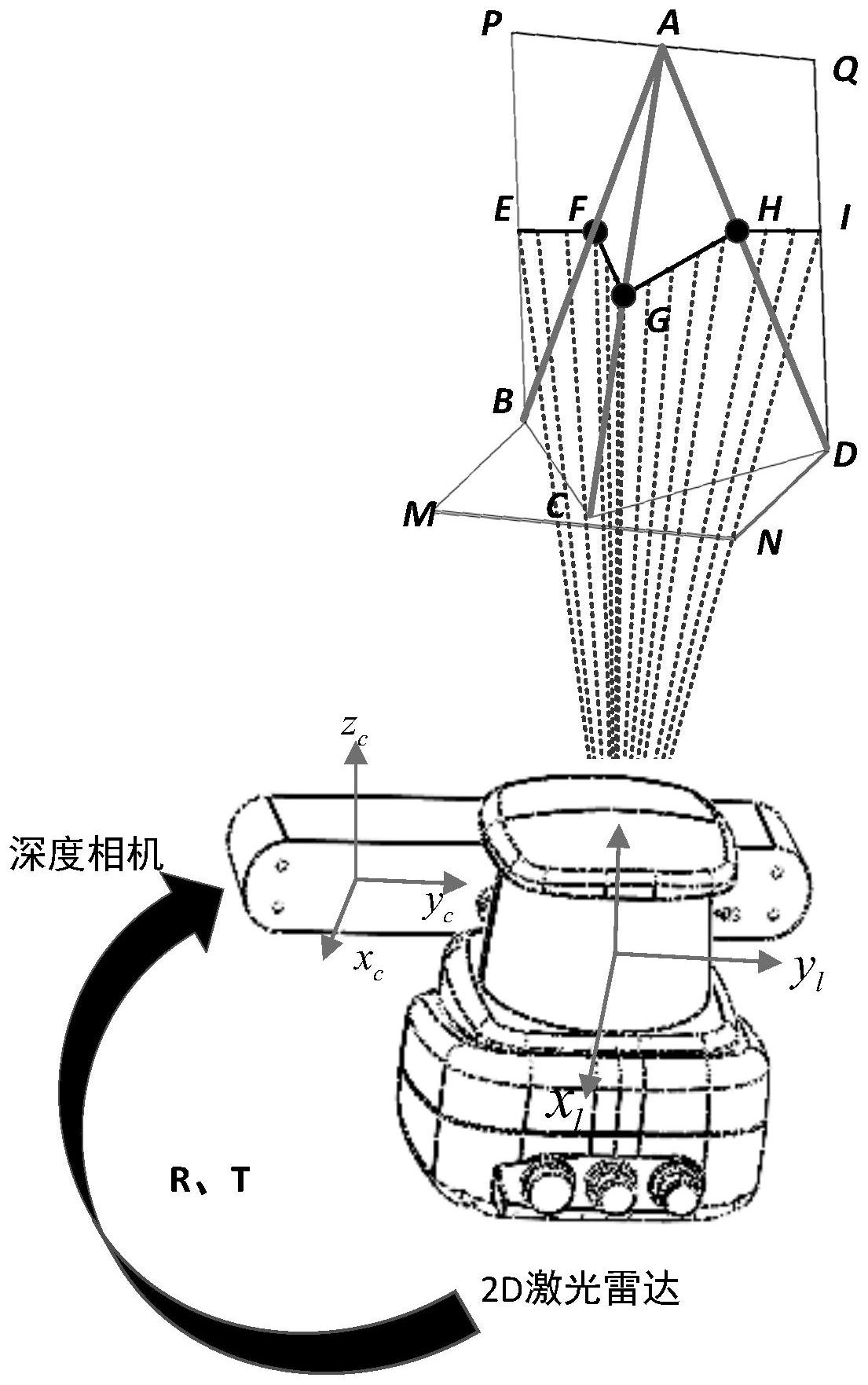
本发明公开了一种激光雷达和深度相机联合标定的标定板、标定方法和系统,属于自主移动机器人技术领域。本发明利用标定板的特定形状得到观测点在激光雷达坐标系和深度相机坐标系下点、线约束对。至少两次观测得到六个约束对和十二个约束方程,利用最小二乘法求解2D雷达和深度相机坐标转换的九个未知变量,从而实现激光雷达和深度相机的联合标定。本发明解决了现有联合标定方法的标定过程繁琐、数据帧时间不同步等问题。
留下评论:
Parse error: syntax error, unexpected '}', expecting end of file in /www/wwwroot/robotservice.siat.ac.cn/includes/sidebar.php on line 78